Au cours de cette mission, plusieurs essais technologiques ont été réalisés. Ceux-ci devaient permettre de qualifier des concepts ou des systèmes en cours de développement qui seront à terme utilisés dans des conditions opérationnelles lors de projets et campagnes scientifiques.
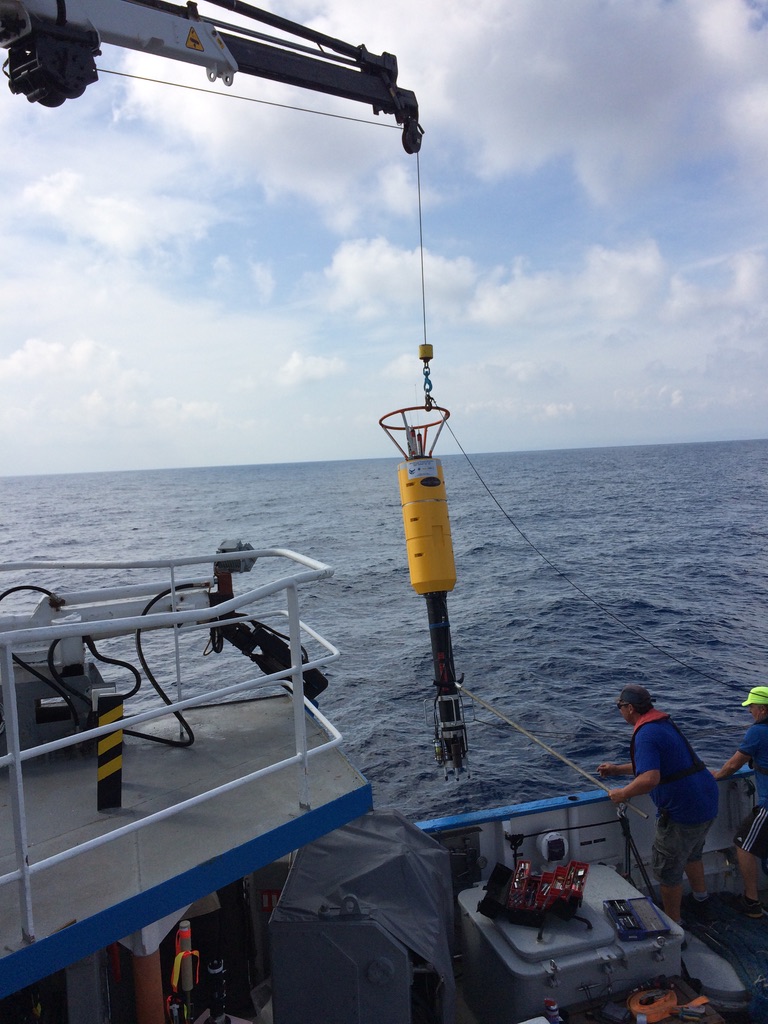
Essais du MicroRiyo: La dénomination MicroRiyo citée dans ce document, désigne l'usage d'un instrument de mesure de la microstructure (microrider) qui évolue le long d'une ligne de mouillage en mode yo-yo (montée/descente). Le microrider est un instrument conçu pour mesurer le cisaillement de la vitesse et la variabilité de la température sur des échelles verticales inférieures au millimètre.
Essais du prototype de flotteur COGNAC: Le flotteur Cognac est un flotteur acoustique à bas coût, développé conjointement entre les équipes du LOPS, de l'ENSTA Bretagne, du département RDT (Recherche et développement Technologiques) et le service NSE/ASTI (Service Acoustique Sous-marine et Traitement de l'Information) de l'Ifremer.
Qualification du flotteur Deep Argo « Tri-têtes » : La qualification de ce flotteur ARVOR équipé de plusieurs capteurs CTD, permettra de réaliser une intercomparaison des différentes CTD et de définir à terme, le capteur qui pourrait à l'avenir équiper les futurs flotteurs ARGO.
Essais du MicroRiyo : il s'agit à terme d'avoir un système d'observation de la microstructure océanique sur mouillage qui permet d'étudier la dissipation de l'énergie cinétique et l'intensité du mélange en réalisant des profils verticaux répétés de manière autonome.
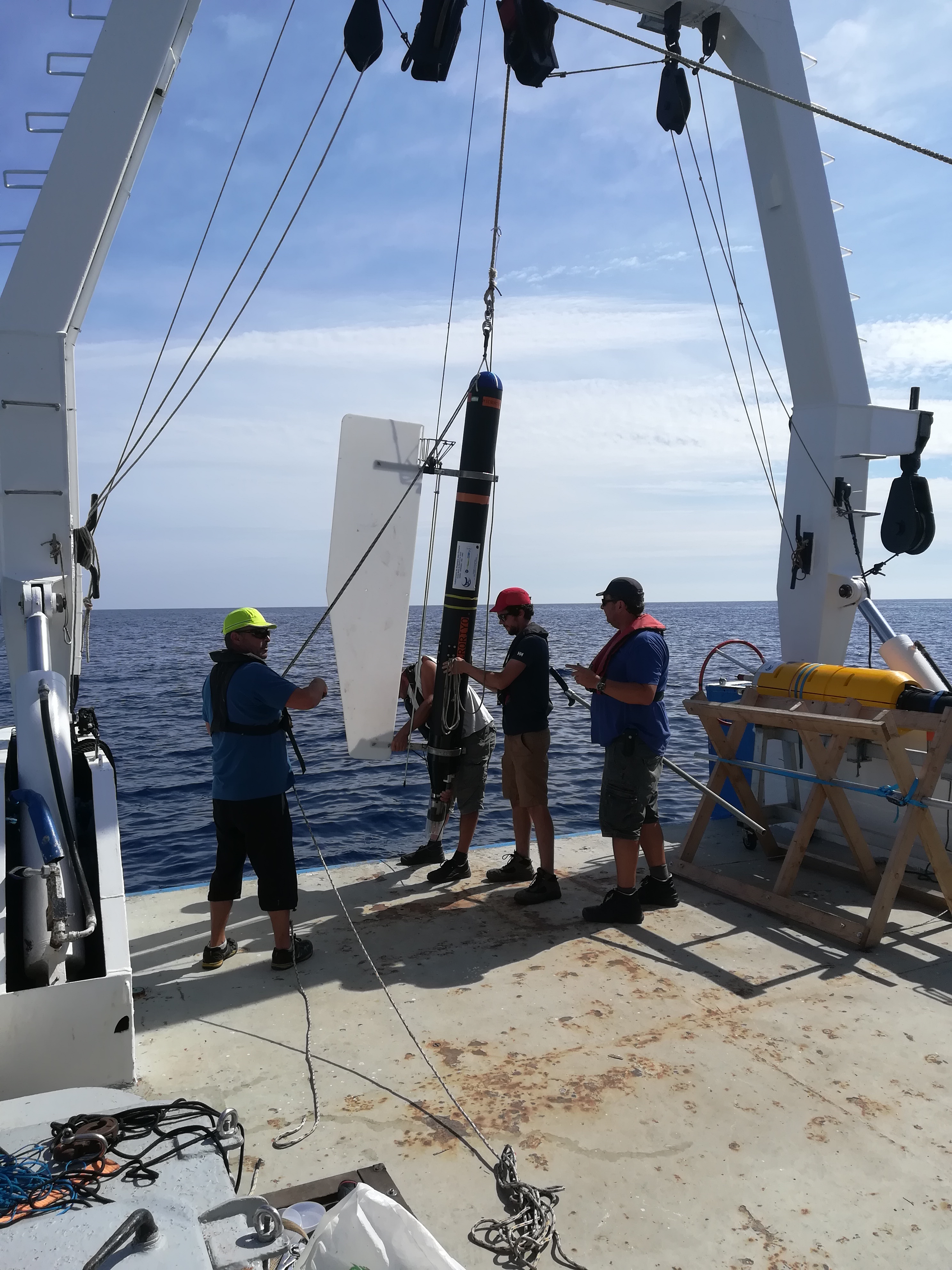
Lors de ces essais, il s'agissait de tester la version 2 du véhicule et d'identifier plusieurs points critiques pour, à terme, faire progresser le projet. Ces essais font suite à la campagne ESSLOPS (2017) qui utilisait la version 1 du véhicule et dont les résultats préliminaires se sont montrés encourageants. Le véhicule a été modifié en une version 2 dont les principales différences sont :
- l'utilisation d'un MicroRider(MR)-6000 qui est venu remplacer le MR-1000 emprunté en 2017 à nos collègues norvégiens de l'UIB (Bergen). Ce remplacement est impactant puisque le MR-6000 a un poids dans l'eau de presque 6 kg contre 0 kg pour le MR-1000. Le choix d'un MR-6000 (acheté par le LOPS fin 2017) s'imposait afin de déployer le mouillage sur des structures bathymétriques profondes pour étudier les interactions courants-topographie.
- la suppression de la flottabilité externe qui entourait le haut du véhicule sur la version 1 afin de réduire la traînée du véhicule lors de ses déplacements le long de la ligne. La diminution de la traînée est une quête perpétuelle puisqu'elle joue sur les vibrations, la vitesse de chute et de remontée de l'instrument, le lest nécessaire pour atteindre une vitesse de chute donnée, ...
- le remplacement des anneaux par lesquels la ligne de mouillage coulisse : utilisation d'anneaux en Teflon à la place de ceux en inox.
Des profils à l'aide d'un VMP6000 ont été réalisés en parallèle des mesures MicroRiyo. Plusieurs essais ont été réalisés :
1/ Afin de comparer le niveau de bruit intrinsèque du vecteur au VMP6000 lorsque le véhicule MicroRiYo est en chute quasi-libre sans la contrainte de la ligne de mouillage.
2/ Afin de valider la capacité à cycler (monter et descendre) le long d'un câble en dyneema d'un MicroRider installé dans un tube de PEHD équipé de flottabilité.
3/ Afin de valider le système de récupération des lests.
Les opérations à la mer ont permis :
- de montrer un défaut intermittent des inclinomètres du MR-6000 qui a nécessité par la suite le remplacement sous garantie d'une des cartes électroniques.
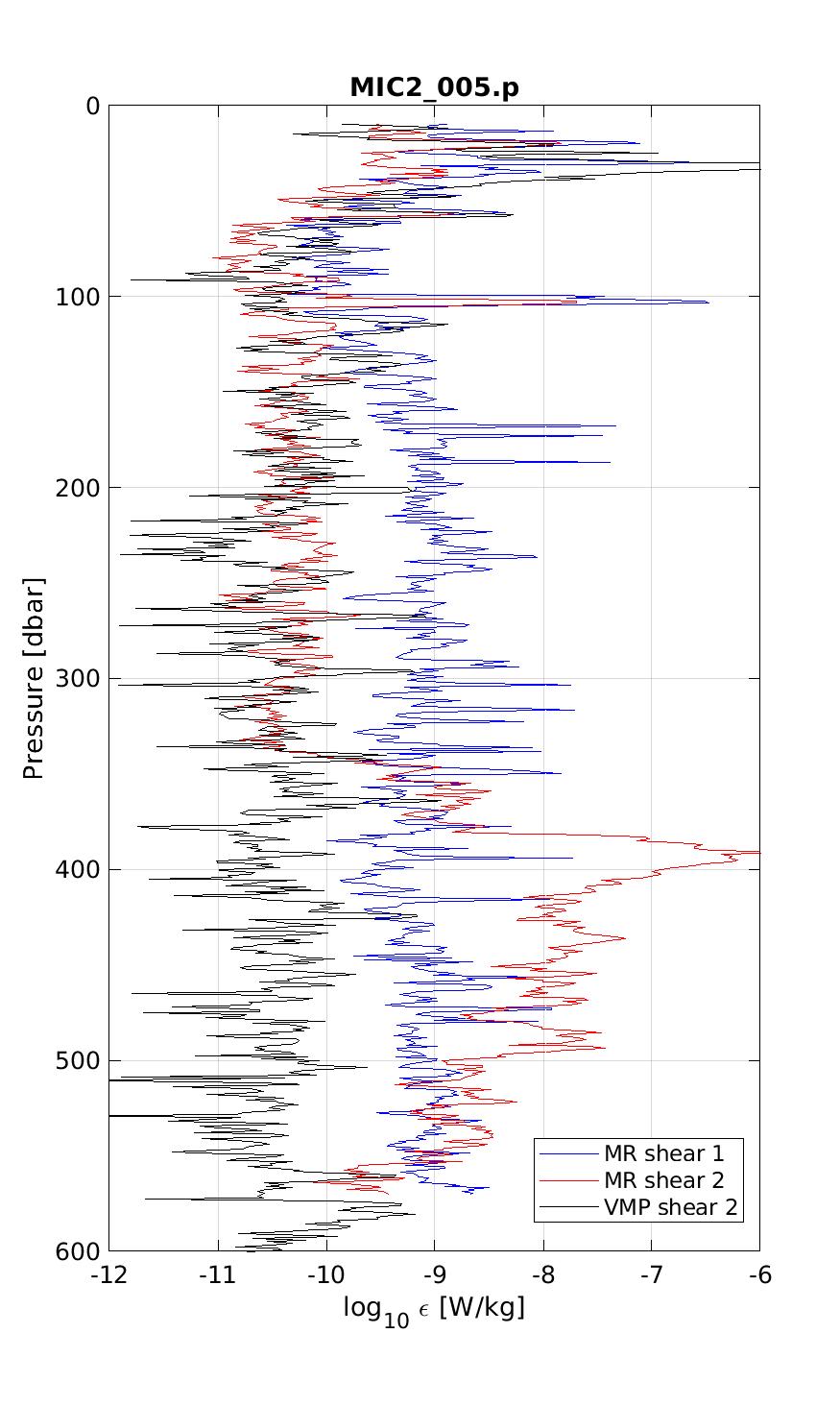
- de montrer qu'une des deux voies (#1) mesurant le cisaillement des vitesses montrait quasi-systématiquement un signal plus fort que l'autre voie (#2) (ainsi qu'en comparaison aux mesures du VMP) lorsque le véhicule est contraint à de déplacer le long de la ligne (problème absent lorsqu'il est en chute quasi-libre). Cette surestimation du signal est indépendante du numéro de capteur utilisé.
- de montrer que la voie (#2) qui se compare très favorablement aux mesures du VMP en subsurface devenait subitement mauvaise à un moment donné sous 200 m.
- d'ajuster le système de récupération des lests placé dans la partie inférieure de la ligne de mouillage. En effet, les premiers tests ont montré qu'une trop grande distance entre le point de largage du lest et le filet de récupération ne permettait pas de les récupérer efficacement.
Essais du prototype de flotteur COGNAC : Il s'agissait de produire des données afin de tester le système acoustique (source RTsys SDA14 et électronique et hydrophone loggerhead) d'un flotteur à bas coût, de tester la sensibilité de la qualité de la géolocalisation dans différentes configurations : la profondeur des sources, la distance entre source et flotteurs. Ces premiers essais ont également été l'occasion de tester plusieurs points du flotteur (comportement dynamique, flottabilité, autonomie énergétique, capacité de transmission, ...)
Les tests COGNAC ont permis :
- de mettre clairement en évidence le manque d'autonomie, notamment lors des phases d'asservissement du système de régulation du flotteur par rapport au cahier des charges.
- de définir le cahier des charges du nouveau système d'acquisition et de régulation à base d'une carte Teensy (sans OS embarqué), notamment afin d'augmenter l'autonomie du flotteur de façon notable.
- de valider le système d'acquisition acoustique qui équipe aujourd'hui les flotteurs, et de prendre en main la source acoustique RtSys.
- D'obtenir un premier jeu de données acoustiques afin de valider le système source RtSys, l'électronique du système de réception acoustique et l'hydrophone qui équipent les flotteurs actuels.
D'une manière générale, ces essais ont permis de mettre au point la version actuelle du flotteur, tant au niveau mécanique, électronique et logiciel.
Figure 2: Flotteur Cognac (Version 2022).
Qualification du flotteur Deep Argo « Tri-têtes » :
Concernant les tests de ce flotteur, ces essais menés avec nos collègues du département RDT (Recherche et Développements Technologiques) de l'Ifremer nous ont permis de réaliser la première étape de qualification (fin des essais de qualification réalisés avec succès en mai 2019) d'une plate-forme qui permet de réaliser de très bonnes comparaisons in situ de divers capteurs CTD, de vérifier la dépendance à la pression, leur précision, ainsi que leur stabilité sur le long terme.
Ces déploiements n'ont duré que quelques jours et ont été limités à 2000 m de profondeur. Ils ont permis de confirmer l'ensemble des aspects fonctionnels de l'instrument et les performances d'acquisition, mais n'ont pas fourni suffisamment de données in situ pour tirer des conclusions sur les performances des capteurs.
Depuis, un déploiement de longue durée de ces flotteurs a été réalisé lors de la campagne RAPROCAN2020.
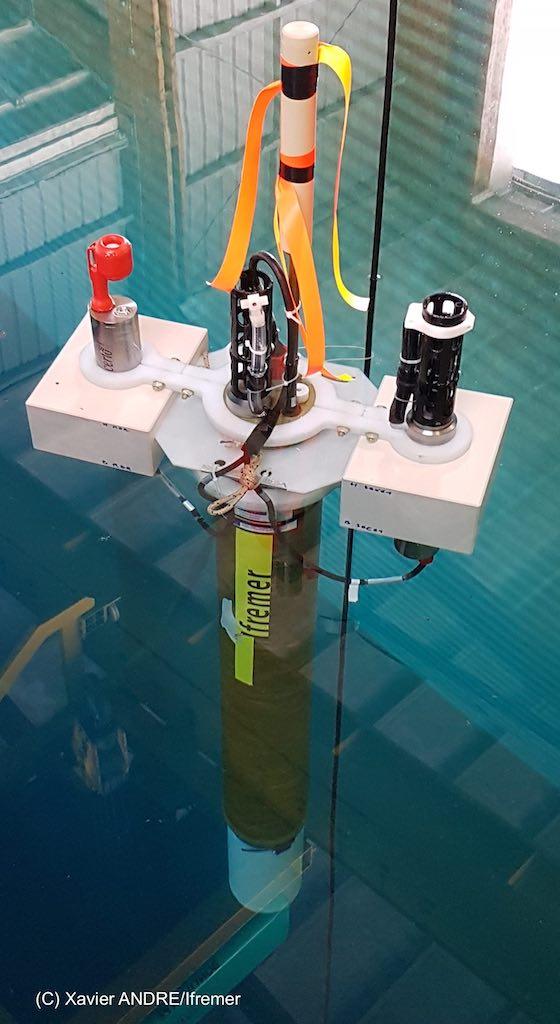
Figure 3: Flotteur Tri-têtes.
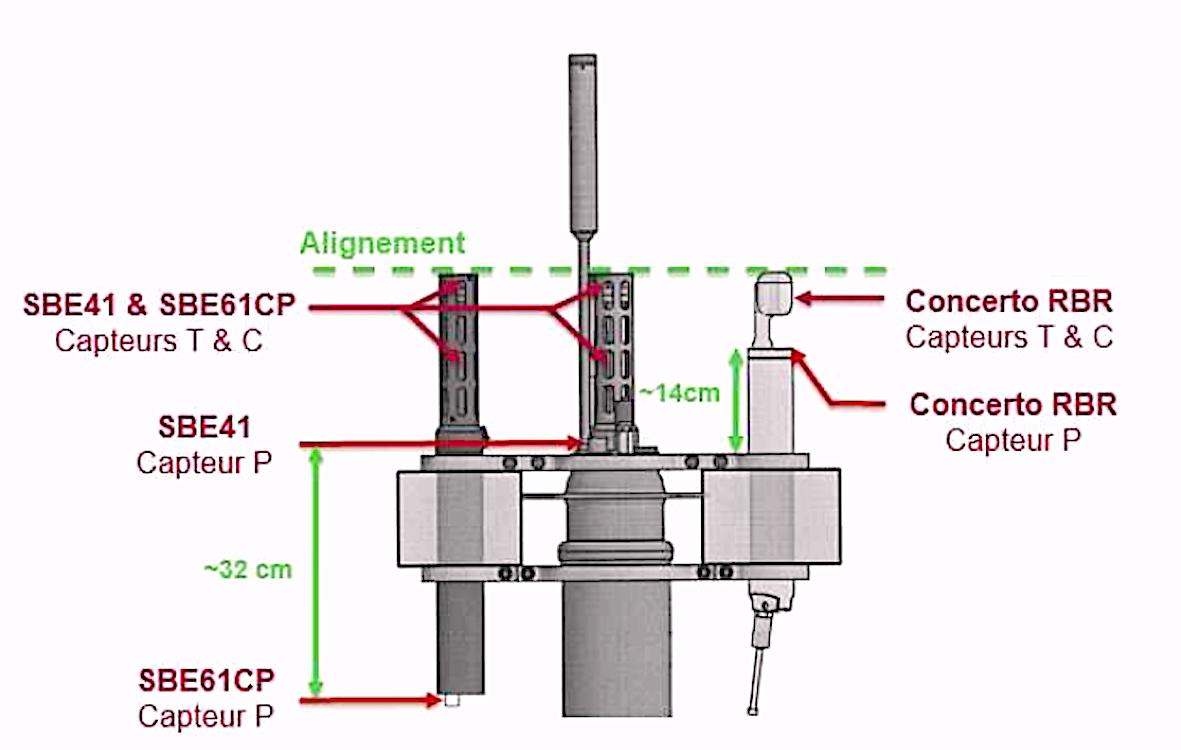
Figure 4 : Emplacement des différents capteurs