The TURBIDENT campaign (Figure 1) aimed to acquire an innovative dataset providing relevant information on the ocean surface layer by combining measurements of surface currents by HF radar operated in parallel by the MIO and sub-surface profiles obtained by acoustic Doppler current meters (ADCP) operating in a stabilised manner below the surface from Ifremer's autonomous underwater vehicle (AUV), in addition to more conventional measurements of current moorings. Ultimately, the aim was to measure vertical profiles of mean horizontal currents, which play a direct role in defining the gradient Richardson numbers on the basis of which turbulent closure models are expressed. The AUV paths were thus adapted to the directions of the radar current components. However, a forest fire partially destroyed the HF radar station in the summer of 2017, which meant that it was not possible to obtain radar data of sufficient quality during the Turbident campaigns. The work therefore focused on in situ data, in particular the validation of current measurement using the AUV.
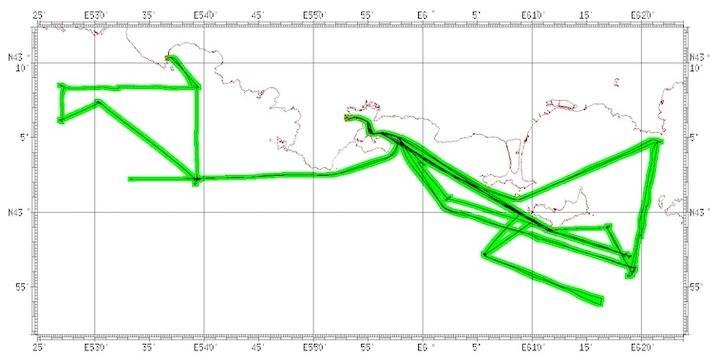
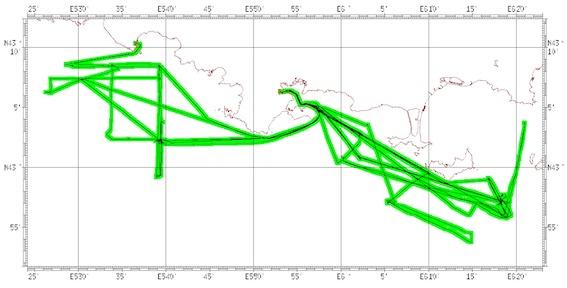
Figure 1: L'Europe's routes during the TURBIDENT-Leg1 (top) and TURBIDENT-Leg 2 (bottom) campaigns off the Hyères islands and the Marseilles Calanques.
In addition, the unique set of field measurements acquired during the TURBIDENT campaign (May to October 2018) aimed to allow us to improve our understanding of the physical processes at play and their interactions in the dynamics of near-surface vertical flows. To this end, the experimental set-up was supplemented by the use of high-resolution drift profilers so as to sample the flows at the airmer interface (Koursk, Ocarina) as part of a project conducted in parallel (LEFE Turboradar) during the Turbident-LEG1 (May 2018) and Turbident-LEG2 (October 2018) campaigns, taking care to have measurements in the same areas. Hydrological and currentological moorings were also deployed throughout the period between the two campaign LEGs in order to sample a wider range of situations.
A detailed report on the context of the campaign, the data acquired and the processing methods developed is available online (Pairaud and Fuchs, 2021, https://doi.org/10.13155/78596).
1- Underwater drones: innovative tools for detailed measurement of currents in the ocean surface layer
Traditionally, marine currents in coastal waters have been measured either (1) at fixed stations (high-frequency measurement networks), (2) from oceanographic vessels equipped with current meters positioned under the hull along the ship's track, (3) using platforms towed at the surface or subsurface from research vessels, or drifting at the surface, which can only be operated in good sea conditions, (4) using high-frequency radars with fixed spatial coverage to calculate surface velocities. However, these systems cannot measure the velocities in the surface layer and their gradient over the vertical with good accuracy. The TURBIDENT 2018 oceanographic campaign is the first scientific campaign to exploit the use of an underwater drone, Ifremer's AUV AsterX, as a support for two ADCPs so as to sample the first hundred metres of the water column with high resolution (less than 50cm) in the first ten metres below the surface, largely free from wave agitation since the AUV sails 10-15m below the surface. Two current meters were used: a 1200kHz ADCP oriented towards the surface (vertical resolution 0.25 to 0.5m and range 15m) and a 300kHz ADCP oriented towards the bottom (resolution 3-4m and range 80m). The aim was to provide the best possible description of the currents near the interface with the atmosphere, while making the link with the circulation in the deeper layers.
The advantages of using Ifremer's AUV as a platform for measuring marine currents include
- the possibility of installing an ADCP looking upwards to access surface currents along transects, which is impossible with a hull or fixed-point ADCP (e.g. observation of the subsurface ocean, plumes, validation of radar currents),
- the very high stability of the AUV and the possibility of navigating at constant immersion, free from the effect of the sea state (which is not the case with ADCPs towed on the surface),
- the presence of an inertial unit that gives the precise location of the AUV underwater, as well as its speed, which is essential for accurately recalculating absolute speeds (currents) (an advantage over gliders),
- the possibility of carrying two payloads and therefore having currents over a significant portion of the water column (up to more than 160m vertically), or increased resolution,
- the possibility of using the navigation DVL to take timely measurements of speeds below the AUV during each AUV mission.
A major task was to develop the ADCP AUV data processing chain following the campaign, in order to convert the speeds measured along the beams of the moving ADCPs/DVLs into absolute speeds in the terrestrial reference frame corresponding to the marine currents, while choosing the right sources for the various parameters (heading, attitude, position and vehicle speed) (see Pairaud and Fuchs, 2021).
a) Comparison of ADCP AUV and ADCP mooring measurements
A 300kHz ADCP (4m vertical resolution) was moored on the Blauquières bank at the eastern entrance to the Gulf of Lion (43°02.2325'N 5°39.3371'E) at a depth of 100 m during Leg 1, then surveyed during TURBIDENT Leg 2, sampling currents every 15 minutes. Comparisons were made between the speeds measured by the AUV's ADCPs along routes passing close to the mooring and the speeds measured by the mooring itself. The strategy consists of comparing the speed data measured when the AUV passes as close as possible to the moorings (Figure 2), and considering the fixed-point ADCP times occurring just before and just after the AUV passes.
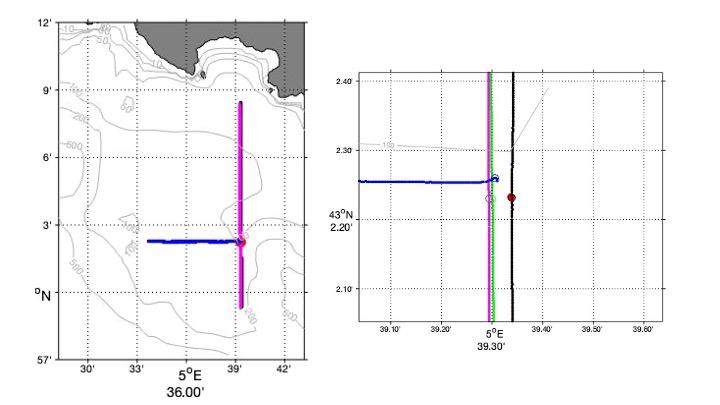
Figure 2: Position of the Blauquières ADCP (red circle), AUV radials and comparison points along the radials (zoom): R7 N-S (black), R7 S-point C (green), R7 S-N (magenta), R11 E-O (blue).
The comparison along the R7 N-S radial corresponds to the AUV passing as close as possible to the ADCP (4 m horizontally). The AUV passed as close as possible to the ADCP on 21 October at 9:24; the times surrounding this measurement for the fixed ADCP are 9:15 and 9:30. Figure 3 shows the vertical comparison between the speed measurements of the ADCP-AUV and the fixed ADCP on these two dates. The measured speeds show little variability at 15 minutes. The location of the comparison point is therefore of prime importance.
Figure 3 shows good agreement between the velocities measured by the two ADCPs in the water section below 6 m depth, with a maximum difference for the u component at the depth closest to the surface. One possible explanation is the greater variability of currents in the upper water section, given that the two ADCPs do not average currents over the same time period, and also the greater vertical variability of currents below the surface.
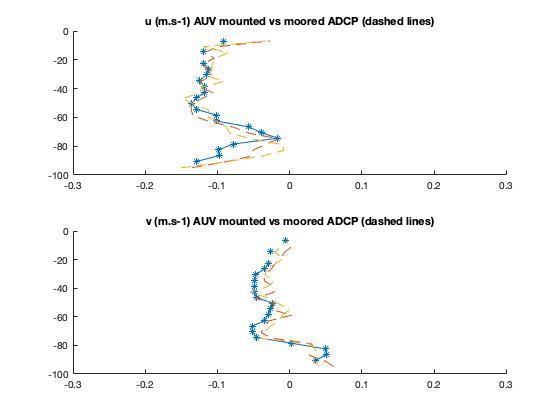
Figure 3: Current profiles measured by the ADCP AUV (blue stars) and by the ADCP Blauquières at 9:15 (yellow dashes) and 9:30 (red dashes). The ADCP AUV currents are averaged over 2 minutes.
Comparisons (not shown here) were also made with a 1200kHz ADCP positioned on a mooring line off Porquerolles (Bombyx) and oriented towards the surface, in order to validate the velocities measured directly below the surface by the 1200kHz ADCP-AUV looking upwards. The latter show considerable vertical variability, and at the time of the AUV trip, there were few usable measurements in the surface layer for the Bombyx ADCP, so the comparison with the ADCP-AUV data is only partial. For the depths considered, however, the orders of magnitude and directions of the velocities measured are in good agreement.
b) Comparison between the AUV-ADCP current measurement and the ADCP current measurement towed by a fish
An ADCP was also towed along the side of the vessel on a fish during the AUV radials in order to make comparisons of the currents measured along the radials.
By way of illustration, figures 4 and 5 respectively show the currents measured by the ADCP AUV and the ADCP towed by the vessel along the same radial off the Iles d'Or. The velocity profiles measured below a depth of 5 m are similar (figures 4 and 5 on the left), which is confirmed by the horizontal cross-sections of the currents at around 45 m depth. For the surface, the depths of comparison differ (6 and 8m), and the speeds measured are higher for the ADCP-AUV at 6m than for the towed ADCP at 8m. This is linked either to greater vertical current variability in this zone of the water column, or to the fact that the ADCPs do not have the same vertical resolution and therefore average over different depths. The 1200kHz ADCP on the AUV averages over 0.25m cells whereas the 300kHz towed ADCP averages over 4m cells and therefore does not see the same layer of water. It can also be noted that the ADCP measurement towed along this path is noisier than the AUV measurement. This is because the fish is less stable and subject to the sea state, and can suffer jolts due to the system for attaching it to the vessel (the line connecting it to the spinnaker pole) in the event of rolling, which is accentuated on L'Europe, which is a catamaran.
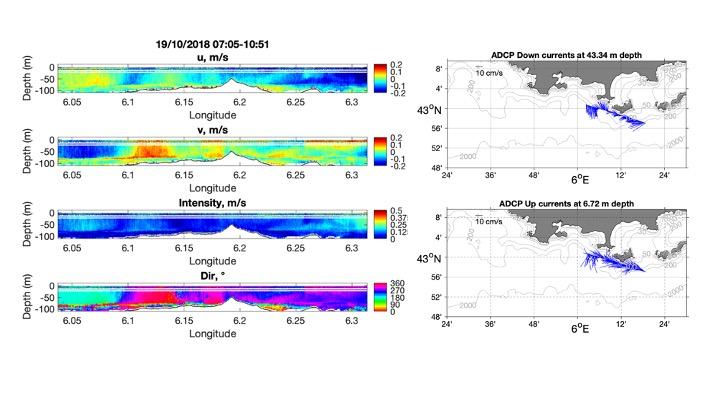
Figure 4: Current profiles measured by the AUV-ADCPs (left) and horizontal cross-sections of currents (right) at depths of 43m and 6m (currents averaged over 30s), for the AUV sailing 10m below the surface.
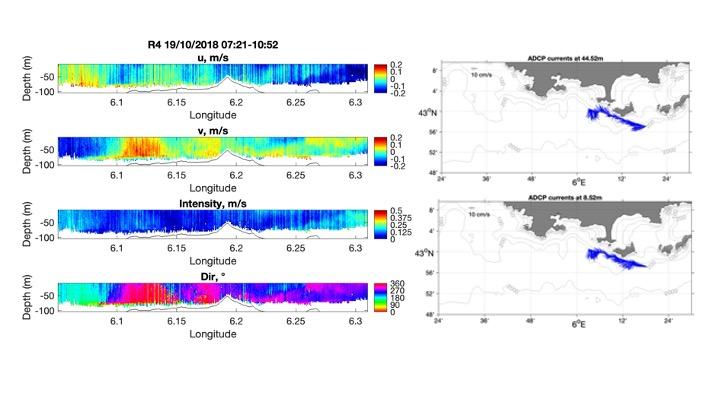
Figure 5: Current profiles measured by the towed ADCP (left) and horizontal cross-sections of currents (right) at depths of 44m and 8m (currents averaged over 30s).
c) Result overview and prospects
The two oceanographic campaigns off the Var coast and the Iles d'Or have provided a better understanding of the spatio-temporal variability of currents in this area, with the acquisition of current data in the immediate vicinity of the surface for the first time. The currents were intensified at the surface for both campaign periods. During Leg2, a vertical shear was observed at around 60-80m depth, associated with the presence of the thermocline. Bathymetry also influenced currents, with island effects (Figure 4).
The development of a methodology for acquiring and processing current data using an AUV (Pairaud et al., in preparation), with high surface resolution, and the possibility of using the ADCP's DVL to measure currents in the water column is a step forward in our knowledge of environments that have been little studied until now (plume zones, submarine canyons, continental slopes, deep zones). Measurements can be taken during all deployments of the devices (the same methodology can be applied to the DVLs of ROVs and HROVs), following the example of ADCPs on ships' hulls.
2- Use of MASTODON-2D low-cost thermistor lines to study upwellings in Provence
The use of MASTODON-2D thermistor chains has made it possible to record temperature variations over a period of several months (Figure 6, top), and to identify upwelling episodes inducing cooling of more than 10 degrees from the summer temperature at around 7m depth for several days, as in August 2018. There have also been episodes of the line diving (Figure 6, bottom) from the end of September during episodes of strong north-westerly currents (see Figure 12, Pairaud and Fuchs, 2021) associated with intrusions of the North Current onto the shelf of the Gulf of Lion.
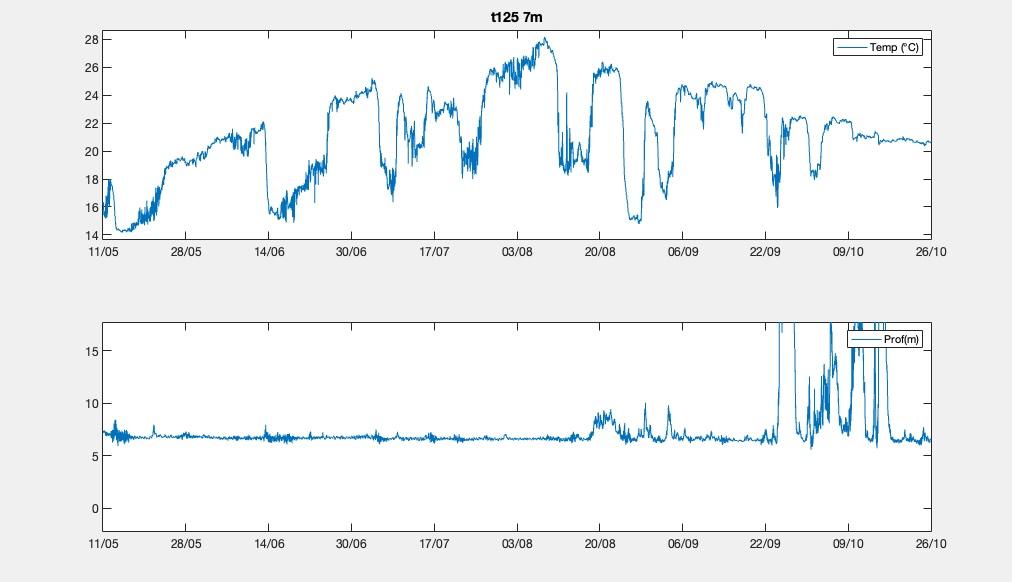
Figure 6: Temperature and depth of the temperature sensor along the MASTODON-2D B line (43°06.1893'N, 5°26.8285'E, 120m depth) during the TURBIDENT campaign between May and October 2018, for the shallowest probe at around 7.6m below the surface.
The experience acquired during the deployment validates the use of this system at depths of more than 100m, with attention to be paid to the slope of the seabed at anchorages, as well as to maritime traffic in the deployment zone, as two out of four lines could not be recovered at the end of the campaign.

 , FRAUNIE Philippe , FUCHS Rosalie
, FRAUNIE Philippe , FUCHS Rosalie