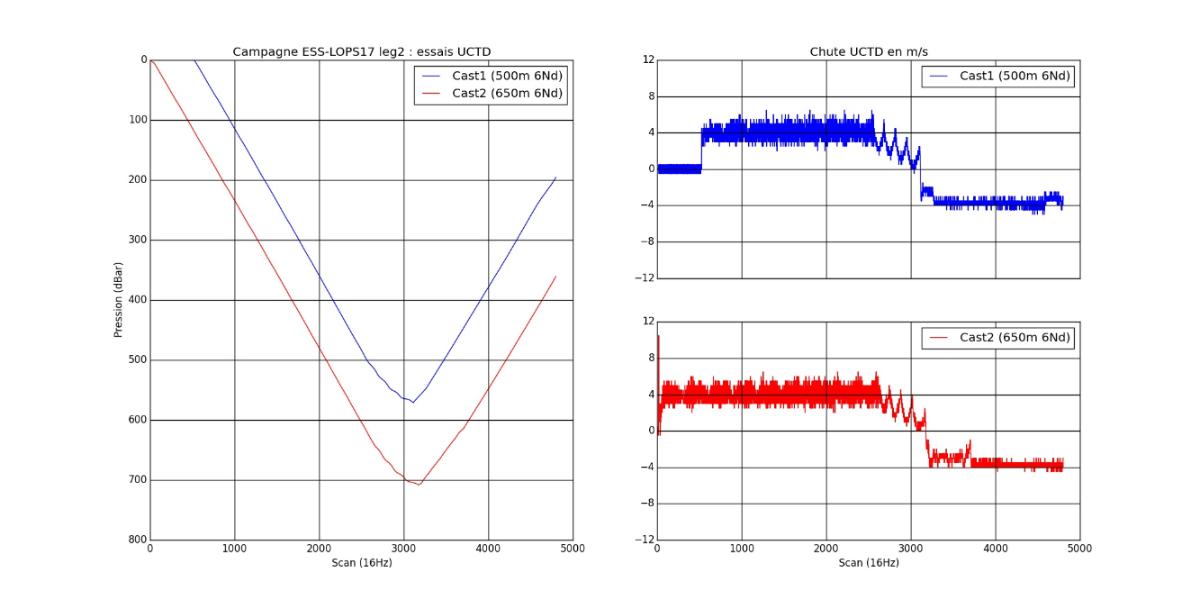
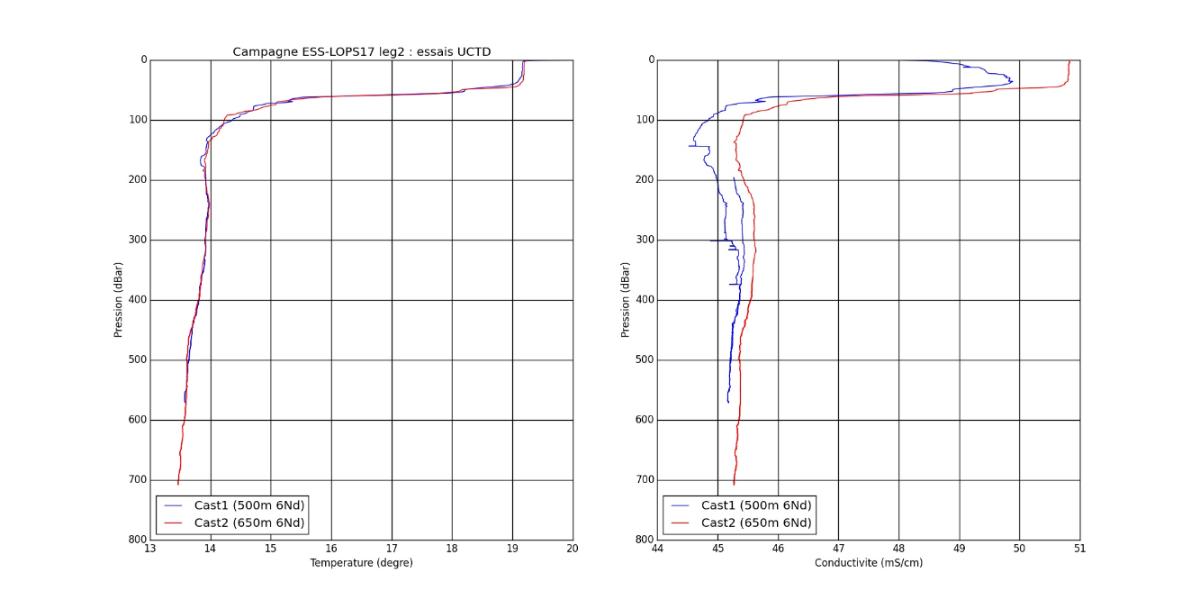
UCTD
Poursuite des essais UCTD (suite à la formation reçue lors du leg1 de ESSLOPS)
Microriyo
Les essais en mer du véhicule MicroRiYo (MR ci-après) se sont déroulés sur deux jours les 31/10 et 1/11/2017. Les travaux se sont déroulés dans la zonex 6 le premier jour (4 profils MR et deux profils VMP) et dans la zonex 4 le second jour (un profil MR et deux profils VMP)
L'Europe n'étant pas équipé d'ADCP de coque, le courant horizontal moyen sur les 500 premiers mètres est estimé à partir de la dérive du VMP entre ses points de déploiement et de récupération. Le premier jour en zonex 6, le courant est assez fort, voisin de 20 cm/s en moyenne sur 500 m ; le second jour, en zonex 4, il est nettement plus faible, inférieur à 5 cm/s. Avantage de cette configuration: le premier jour permet de tester si le véhicule ne reste pas bloqué sur sa ligne par des frottements accrus dus aux courants horizontaux transverses à la descente du véhicule. On peut également tester si le rapport signal sur bruit (sondes de cisaillement) n'est pas trop dégradé en présence d'un tel courant. Le second jour en faible courant permet de tester le niveau de bruit qu'on est en droit d'attendre dans les abysses où les courants sont généralement plus faibles (hors zones topographiques ou méso-échelle).
Plusieurs tests initialement prévus pour le Leg-1 ont été menés pour comparer les vitesses de chute dans différentes configurations et pour déterminer la qualité des données de dissipation par rapport aux données de référence du VMP-6000.
a) Vitesse de chute
Les vitesses obtenues en mer sont plus faibles de 10 à 20 % que celles du bassin pour un lest de 800 g. Elles restent assez proches de ce qu'on pouvait en attendre en prenant un coefficient de traînée (Cx) de 0.1 (après estimation approximative avec les mesures en bassin). L'essai avec un lest de 400 g (MR#3) ne donne rien de concluant : le MR reste souvent bloqué et descend par intermittence. Pour tous les profils MicroRiYo, les vitesses de chutes sont irrégulières et généralement faibles dans les 50 à 100 premiers mètres avec les lests de 800 g et 1200 g (w < 0.3 m/s pour z < 50-100 m).
Les vitesses plus faibles en mer par rapport au bassin peuvent être dues au frottement accru sur le bout induit par la présence de courants horizontaux (notamment le fait que la vitesse de chute soit irrégulière et faible sous 50-100 m). La différence de densité entre le bassin d'essais et la Méditerranée contribue également avec une flottabilité du MR (positive) supérieure de 120 g en Méditerranée ; cela peut expliquer aussi en bonne partie la différence de vitesse lors test avec lests de 800 g. Enfin, la présence de la dérive (profil #5) ralentit nettement la vitesse de chute car elle ajoute de la flottabilité (~170 g) et de la traînée (ralentissement pour moitié dû à ces deux causes d'après estimation « à la louche »).
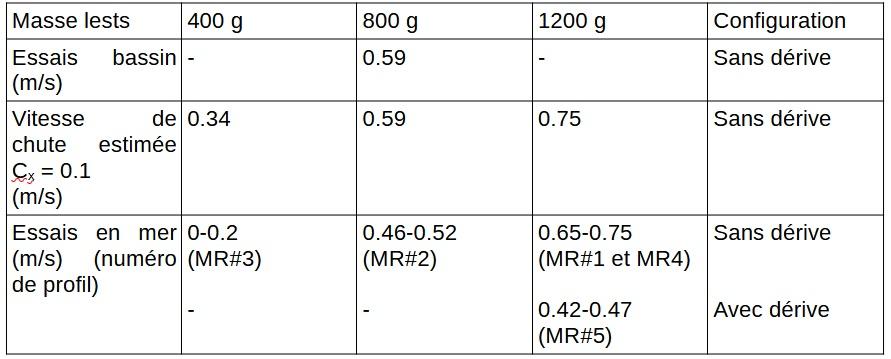
Table 1 : vitesse de chute du véhicule MicroRiyo en fonction de la masse des lests ajoutés sur le véhicule. Ligne 1 : vitesse mesurée au bassin d'essais, ligne 2 : vitesse estimée à partir d'un coefficient de trainée Cx de 0.1, ligne 3 : vitesse mesurée en mer une fois celle-ci bien établie.
b) Vibrations et dissipation d'énergie
Le principal but de ces essais MR en mer était de déterminer si les frottements du MR sur la ligne n'induisent pas trop de vibrations parasites sur les mesures de fluctuations de vitesse et donc de la dissipation d'énergie cinétique. Une comparaison des profils de dissipation du VMP et du MR montre des résultats encourageants.
La figure 1 illustre la variabilité de la vitesse de chute du second profil du MR. Ce n'est que vers 120 m que la vitesse se « stabilise » vers 0.45 m/s. La dissipation d'énergie relevée lors de ce second profil MR montre un bon accord général avec le profil VMP #2 sous 120 m (i.e. là où la vitesse de chute du MR est stabilisée)(Fig 2. ). L'écart avec le profil VMP #1 est plus important sur certaines gammes de profondeurs. L'écart entre les deux profils VMP illustre la variabilité temporelle de la dissipation à cet endroit. Ce second profil MR a été réalisé 3h après le VMP #1 et 3h avant le VMP #2. Les mesures de dissipation du MR au dessus de 120 m ne sont pas bonnes (là où vitesse du MR est faible et non stabilisée). Sur quelques autres portions courtes, la dissipation du MR est aussi contaminée (150-170 dbar, 400-420 dbar, 500-510 dbar). La raison n'est pas connue à ce jour. Le comportement du véhicule devra être analysé de près pour comprendre ce qu'il se passe sur ces petites régions.
En zonex 4, le second jour, la dynamique océanique est moins énergétique. La vitesse de descente du MR se stabilise dès 80 m (Fig. 3 ), profondeur à partir de laquelle la dissipation du profil MR devient cohérente avec le profil VMP #4 (Fig. 4). Les courants étant moins forts (< 5 cm/s en moyenne), la turbulence est plus faible et l'on observe que le signal de dissipation du MR est toujours cohérent avec celui du VMP même lorsque la dissipation est inférieure à 10-10 W/kg (sous 300 dbar). Ceci montre que les profils du MR ne sont globalement pas vraiment beaucoup plus bruités que ceux du VMP dans ces cas de figure.
Conclusion de ces tests : les mesures de dissipation le long de la ligne à l'aplomb du navire sont généralement de bonne qualité par comparaison au VMP-6000. Ces essais ont motivé la poursuite du projet. Suite à cette campagne, un MicroRider 6000 a été acquis au LOPS et a été intégré dans une version 2 du véhicule.
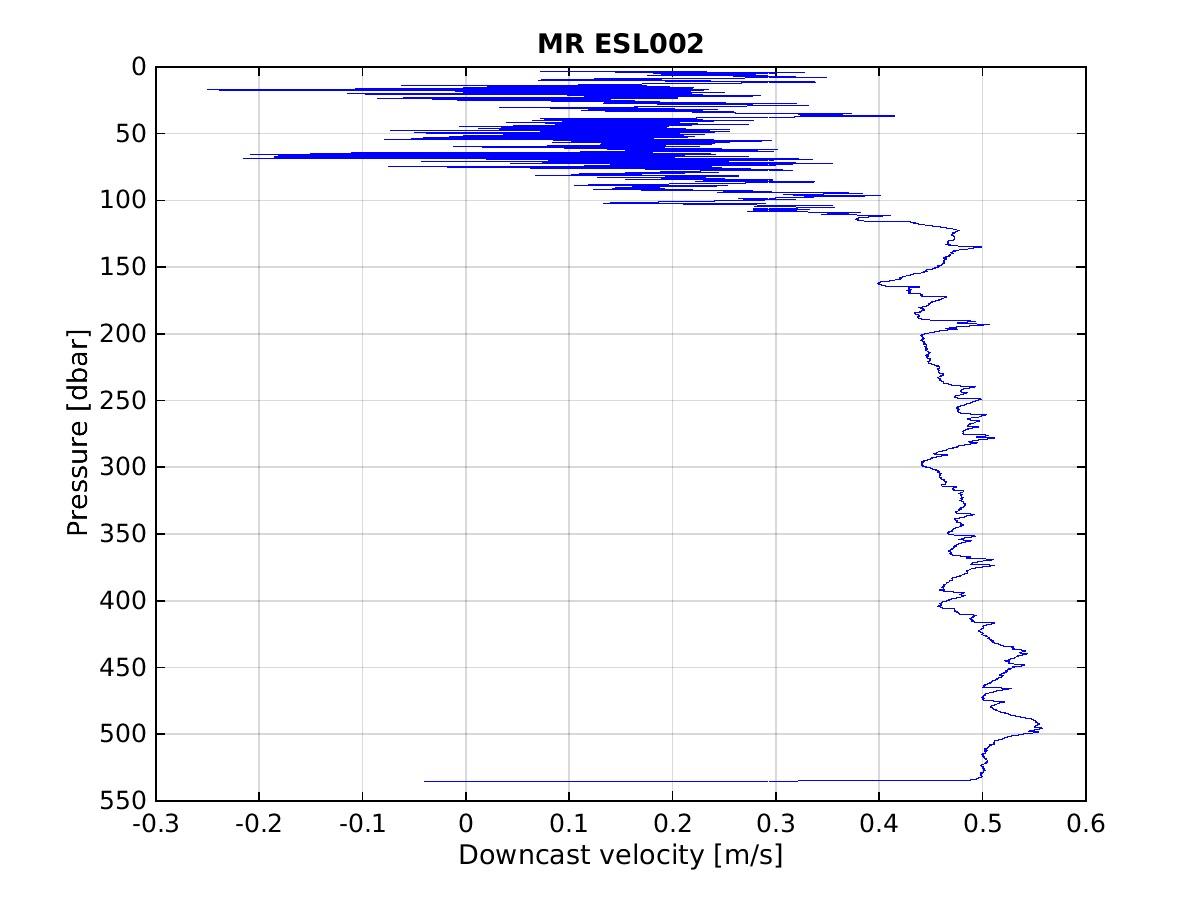
Figure 1: profil de la vitesse de chute en fonction de la pression pour le second profil MicroRiYo (lest de 800 g).
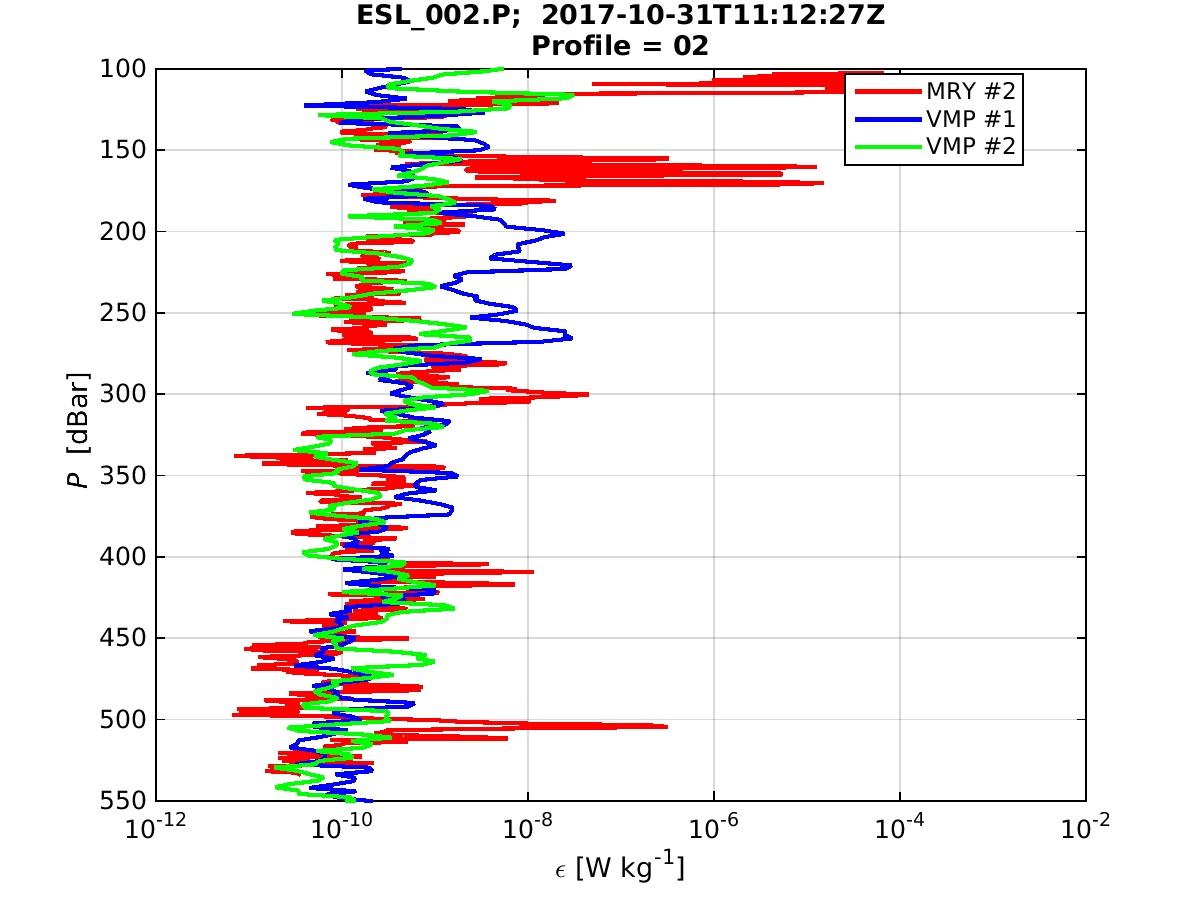
Figure 2 : Profils de dissipation d'énergie cinétique [W/kg] pour le second profil MR et les deux premiers profils VMP.
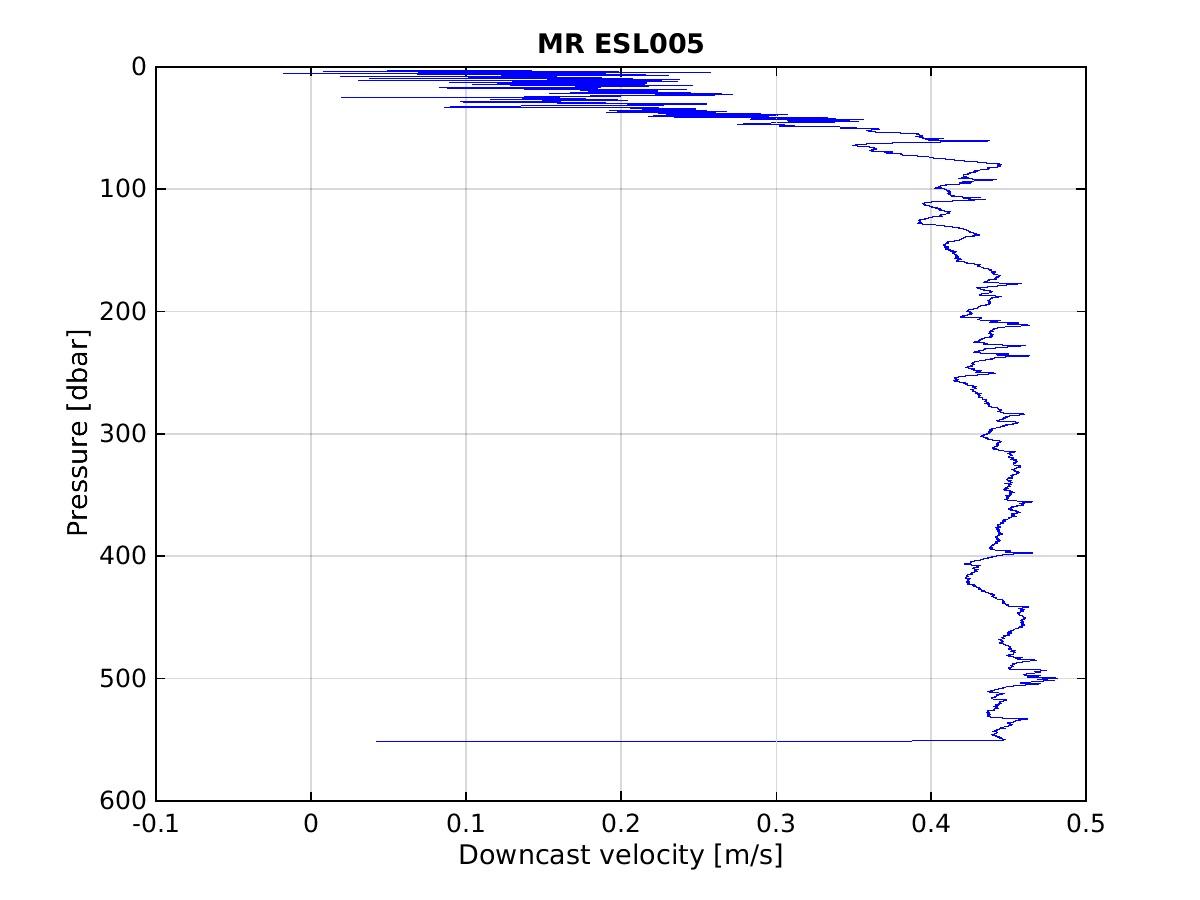
Figure 3: profil de la vitesse de chute en fonction de la pression pour le cinquième profil MicroRiYo (lest de 1200 g, avec dérive).
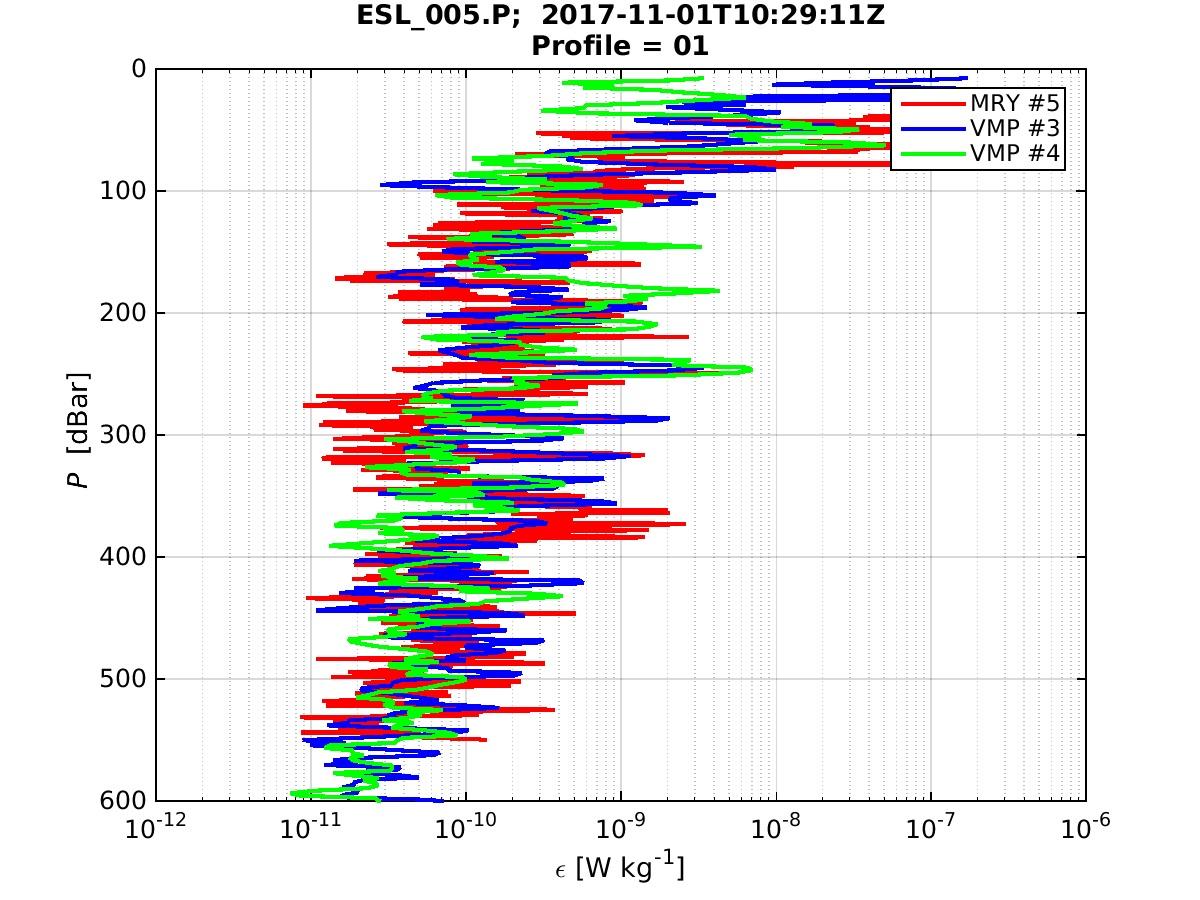
Figure 4: Profils de dissipation d'énergie cinétique [W/kg] pour le cinquième profil MR et les deux derniers profils VMP.



